- 0577-65138780
- gxdz01@163.com
- English

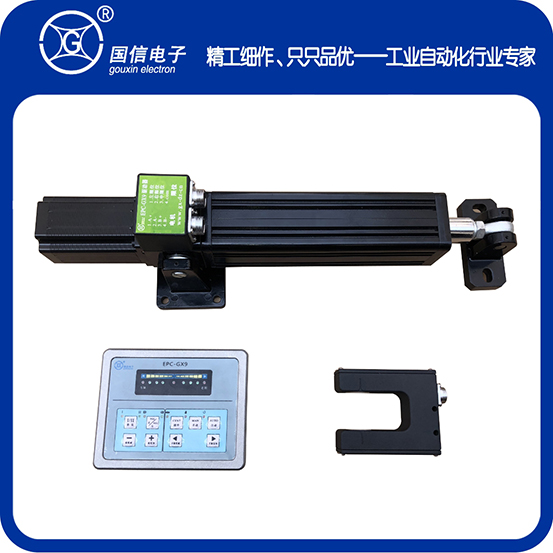
纠偏控制器目前使用的一种设备,其主要功能是纠正物料运行时的蛇形偏差,保证物料的直线运动。接下来由国信纠偏控制器介绍纠偏控制器工作原理。
一套自动纠偏控制器系统试验装置,用于纸张,宽度为220nm。光电传感器检测到带材在传输过程中的横向偏移,并产生与偏移量成比例的电信号,将其发送给放大器,并通过门电路转换为所需的脉冲控制信号,然后通过功率放大发送到电机,使其正转、停止或反转。电机轴端连接螺钉,螺钉驱动固定在滚动导轨上的螺母,使滚动导轨上的滚筒水平移动到偏差相,从而实现偏差纠正。
该校正形式适用于不规则卷材的加工和处理,以及卷材校正形式。该系统不纠正带材的偏差,而是使传感器始终跟踪带材的边缘,以实现卷材的整齐边缘。
快速、准确、可靠地测量偏差信号,是保证系统正常运行的前提。本装置采用非接触式反射光电传感器,调查,从光源发出稳定的直流光源,通过透镜到平行光,半透镜分为两束,即直射光和反射光,参考光敏管接收反射光,直射光到反射镜,然后按原路返回,半透镜半透镜反射后通过透镜聚集成一点,投射到测量光敏管上。当皮带在光轴附近移动时,测量光敏管的照度与皮带移动|的运动规律有关,并发出相应的电信号。传感器输出的电信号很小,需要放大器来放天空。放大器形成差动输入模式,可双极性输入,输出驱动部分。
新闻推荐
纠偏控制器:实现生产过程中数字化控制2023-05-31
纠偏控制器是生产过程中的一种自动化、数字化控制设备,主要应用于平板材、卷材等产品的生产过程中,能够…
纠偏控制器:实现企业自动化、精益生产升级,提高生产质量和效率2023-05-31
纠偏控制器是用于生产过程中自动纠偏的控制器。其基本原理是通过将校正后的反馈信号与生产过程中实际的输…
张力控制器在行业中的应用2023-05-24
当需要在制造过程中对材料进行张力控制时,张力控制器是必不可少的。它们能够帮助确保生产过程中材料的正…
纠偏控制器:实现生产自动化的重要组成部分2023-05-16
随着工业自动化水平的不断提高,纠偏控制器已经成为生产自动化中不可或缺的一部分。纠偏控制器的主要功能是…